Aself-driving taxi picks you up at home and seamlessly delivers you to work. Automated vehicles deliver your lunch and your packages; they pick up your kids from school; they magically solve the problem of finding a parking spot; and they eliminate drunk driving. Transportation is as easy as clicking a hyperlink in a browser. With minimal effort on your part, available vehicles are routed to you, intelligently balancing network congestion to quickly get you where you’re going.
Steven Shladover, a research engineer with UC Berkeley’s Partners for Advanced Transportation Technology (PATH) program, began pioneering automated transportation in the 1980s. He believes that a seamless, autonomous transportation network is still decades away. However, recent advances in engineering and computer science have demonstrated that automated driving can dramatically improve the safety, efficiency, and availability of transportation, bringing this futuristic scenario a little closer to reality. This is the story of just how far automated transportation has come in recent years, and where it may go in our lifetimes.
Safety first
Last spring, 12 children and four adults were injured when a bus full of Berkeley summer campers rear-ended a van on westbound I-80, causing a chain reaction of collisions. This accident was one of many similar collisions that happen each year, now the leading cause of death for teenagers in the United States. All told, 5.4 million automotive crashes happen each year in the United States, and these car crashes result in an estimated $871 billion in economic, social, and emotional damage.
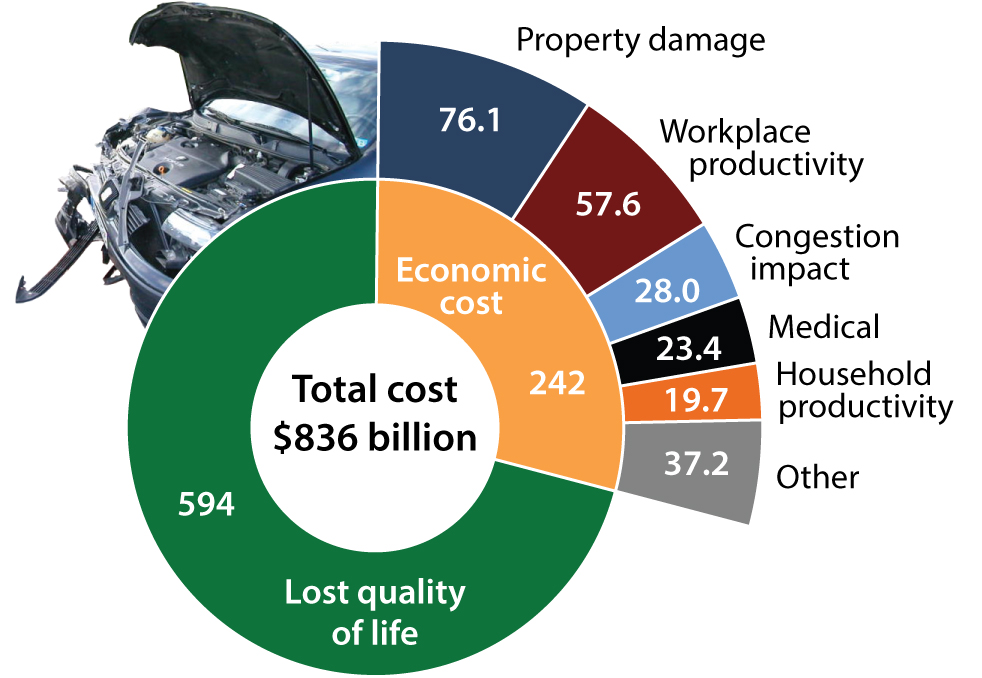 The annual cost of motor vehicle crashes in the United States in billions of dollars, according to a study from 2010 by the US Department of Transportation.
The annual cost of motor vehicle crashes in the United States in billions of dollars, according to a study from 2010 by the US Department of Transportation.
Many automobile accidents stem from human error. Automated vehicles have the potential to improve traffic safety, but developing the necessary technologies has proved a formidable challenge for researchers and engineers over the last four decades. Simply replacing human drivers with machines does not guarantee safety—in fact, nothing will ever guarantee absolute safety in a moving vehicle. From children playing in the street, to birds, snowstorms, and even inattentive or aggressive human drivers, the hurdles to making driving safer can seem insurmountable. However, autonomous vehicles can limit the risks of driving. To work toward this goal, researchers and engineers are trying to improve all of the parts involved: on-board sensors, vehicle-to-road communications, and underlying software.
Nearly 20 years ago, researchers from UC Berkeley’s PATH showed that autonomous vehicles could operate safely on a freeway. In partnership with General Motors (GM), they tested an autonomous platoon of vehicles on a freeway in San Diego in 1997. Magnets were embedded a few feet underneath the road surface and guided specialized vehicles along the center of each lane with high precision. Due to the nature of magnetic fields, this system was largely immune to weather conditions and sensor malfunction. Eight driverless Buick LeSabres drove single-file with just seven feet between each vehicle. They changed lanes and shifted positions, all without any human input. The event enjoyed national news coverage, and the 1,000 visitors who rode in the vehicles were ecstatic.
Despite the success of PATH’s early trials with its autonomous vehicles, the US Department of Transportation decided to cut the funding for the project, citing budget pressures and the greater importance of near-term safety systems. Much of the work was left unfinished and unpublished.
Nevertheless, this scheme for automated driving—using road-embedded magnets to guide vehicles—remains the preferred strategy for helping autonomous vehicles “see” the road. On a snowy day, most human drivers struggle to control their vehicles on the road, due to low tire traction and reduced visibility. Soon after PATH’s first successful demonstration in 1997, PATH researcher Wei-Bin Zhang and his team turned the problem of snow driving on its head by developing a magnet-based automated guidance system for safe snow removal. The system allowed human snow plow operators to safely navigate snow-obscured roads. Dubbed the Advanced Snowplow Project, Zhang’s group successfully tested their automated snowplow at several locations, including the notorious Donner Pass in the Sierra Nevada.
This precise magnetic guidance system has also made it easier for wheelchair users to board public transportation vehicles, by guiding large vehicles to within two centimeters of the curb. In 2013, PATH ran an autonomous public bus line in Eugene, Oregon as part of a six-month study on improving bus accessibility for the disabled. While the results of this study were promising, “now the challenge is how to get [this technology] commercialized so that it could be used more widely,” says Shladover. This scheme is cost effective, says Shladover, and does not need much maintenance.
In addition to magnetically guided systems, which depend on the modification of roads, researchers have developed alternative schemes for automating driving in novel environments. In 2005, the US Department of Defense’s Defense Advanced Research Projects Agency (DARPA) issued a “Grand Challenge” on autonomous driving in desert areas, with the motivation of aiding in combat scenarios. This challenge spurred university researchers across the United States to begin new projects with the goal of designing autonomous vehicles that could navigate the desert environment. In 2007, DARPA issued a follow-up challenge to develop autonomous vehicles for urban driving. Five vehicles completed the desert track and six completed the urban track, expanding the applicability of automated transportation beyond highways. Several members from the winning teams of both contests were soon recruited to work on Google’s self-driving car team.
Unlike UC Berkeley’s PATH vehicles, the vehicles borne from the DARPA challenges relied on expensive sensors, computer vision algorithms, and planning algorithms from the field of robotics to “see” the road. Relying on computer vision alone complicates road safety in an autonomous vehicle, but Google’s efforts to develop a self-driving car have proven the feasibility of automating driving without specially-designed roads. At the time of writing, Google’s self-driving cars have completed over one million miles of testing, resulting in only one accident for which Google was at fault.
Current research at UC Berkeley continues to develop new methods for improving safety in automated transportation. One approach, developed by the Hybrid Systems Laboratory and electrical engineering and computer science (EECS) Professor Claire Tomlin, uses a technique called reachability analysis. Reachability analysis uses detailed physical models of vehicles and their environments to evaluate unsafe conditions that could be encountered when moving along a particular route. These models explicitly account for uncertainty and worst-case scenarios, providing bounds for what an autonomous vehicle can safely do.
NASA is now applying these reachability analyses to study the safety of drones flying in close proximity to one another in vast airspaces. One goal of this research is to help automate platoons of many drones, which are in part inspired by the ground vehicle platoons of PATH’s 1997 highway experiments. Their research shows how treating groups of drones as single units can dramatically improve the safety and efficiency of automated flight.
Airspace and public roads have some key differences, however. “Automating driving a vehicle on public roads is orders of magnitude more complicated than an autopilot system for commercial aircraft flying at 30,000 feet,” says Shladover. “If something goes wrong at 30,000 feet, you’ve got on the order of 10 seconds to identify what’s going on and try to correct it; if you’re in a road vehicle, you have about one-tenth of a second.” Still, efforts like these are bringing us closer to making safer roads a reality.
Freeing the freeway
While road safety deserves careful consideration in the design of any autonomous car, bumper-to-bumper traffic affects drivers frequently—and might be alleviated by driverless cars of the future. “Phantom” traffic jams, which appear out of nowhere, are perplexing to both drivers and researchers. There are no accidents, traffic bottlenecks, work zones, or bad weather to explain why a road is backed up with traffic. This type of traffic jam accounts for about a quarter of all traffic jams, and results in inefficient stop-and-go driving. Solving phantom jams and reducing stop-and-go driving with the help of autonomous vehicles would do more than save drivers time—the braking and acceleration inherent to driving in traffic also wastes gas. So why do these jams occur in the first place?
Car-following models were first developed by researchers at GM in the 1950s and explain patterns of stop-and-go traffic by relating one car’s speed to the speed of the car in front of it. As one car slows down, the following car is forced to brake after a brief delay due to the driver’s reaction time. Then the following car brakes, and the reaction times of each driver begin to add up. This compounded delay, caused by human reaction times, causes backwards propagating waves to travel down the freeway, which we experience as stop-and-go traffic. If you were to watch stop-and-go traffic from a highway overpass, you would see a wave moving backwards even though all the cars are moving forwards. In physics, this concept is known as the backwards wave.
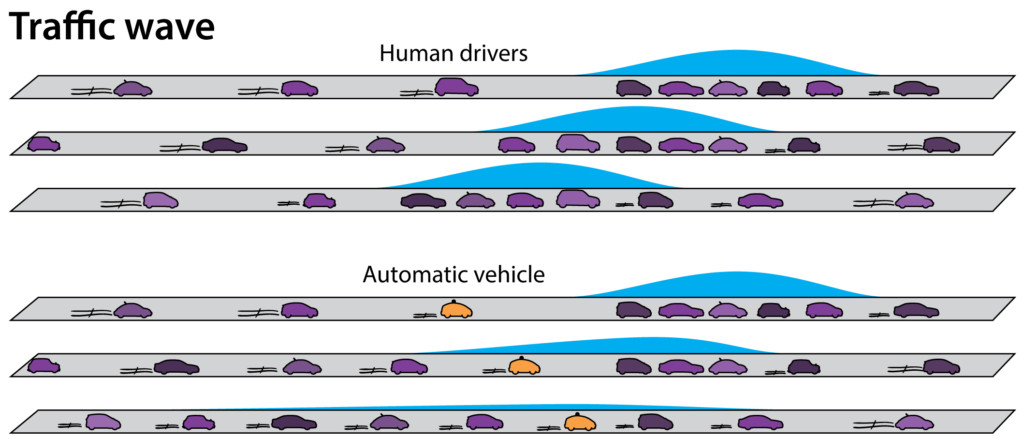 Top: In freeway traffic, human drivers typically accelerate to catch up with the car preceding their own. This cartoon shows how human reaction times can cause a chain reaction of drivers braking, one after another, even after the first car begins to accelerate again. The group of slowed or stopped vehicles seems to travel backwards, even though all the vehicles are moving forward. This phenomenon is known as the backwards wave.
Top: In freeway traffic, human drivers typically accelerate to catch up with the car preceding their own. This cartoon shows how human reaction times can cause a chain reaction of drivers braking, one after another, even after the first car begins to accelerate again. The group of slowed or stopped vehicles seems to travel backwards, even though all the vehicles are moving forward. This phenomenon is known as the backwards wave.
One of the primary motivations of the automated highway project of 1997 was to prove that autonomous vehicles can operate with minimal reaction times, and can be designed to drive without the stop-and-go phenomenon. When vehicles follow one another so closely, air drag is reduced and fuel economy improves by 20 percent. This finding has particular implications for America’s vast trucking routes and net energy consumption. In the future, freeway traffic may be optimized through the automated coordination of platoons of passenger and commercial vehicles, cutting transit times, saving gas, and reducing a major source of frustration for drivers.
Confronting the last mile
Freeway traffic isn’t our only source of transportation headaches. If an automated taxi dropped passengers off at the freeway exit nearest to their destination—rather than at their doorstep—most people would still have miles left to travel. This is particularly true in the United States, where many people still live in sprawling suburbs. This is called the last mile problem, referring to the technical, economic, and political challenges of transporting people efficiently across short distances.
While the volume of vehicles passing through a given freeway exit is likely to be high, the volume of vehicles driving on a particular neighborhood street tends to be low. Such sparse traffic in residential areas has its benefits in less noise pollution and better air quality. However, from an economic standpoint, this means that it is much cheaper for transit systems to operate exclusively along freeways and freeway exits, avoiding individual homes.
In dense urban centers like downtown San Francisco, the economics of the last mile problem are less daunting. However, coordinating transportation needs in such places presents its own challenges, requiring excellent estimation of timing and demand. When and to where should available vehicles be sent? Can we measure or even predict where people are coming and going?
Answering these questions relies on origin-destination estimation, which estimates the demand for travel between pairs of locations in a network. Origin-destination estimation has been actively studied by the transportation research community since the 1940s, but a paucity of real-world data has long stymied its successful application to the last mile problem. For decades, the best available data was based on census surveys, which directly query the population for its transportation needs. Since the 1970s, advances in sensing infrastructure, including traffic counters embedded underneath roads, have bolstered origin-destination estimates. These estimates have played an integral role in long-term urban planning and road development in highly-trafficked areas, but relatively few roads in a given city are actually equipped to monitor their traffic, complicating efforts to accurately predict exactly where and when bottlenecks might occur.
In 2015, UC Berkeley EECS Professor Alexandre Bayen and Professor Alexei Pozdnukhov from the Department of Civil and Environmental Engineering studied an alternative approach for estimating short-term transportation needs. Their research teams collaborated with AT&T to develop a new optimization method called Cellpath, which uses high-resolution data from cell phones to predict transportation demands in the greater Los Angeles area. This work showed that the demand for travel on particular routes could be estimated with 90% accuracy using location traces from cell phones. The researchers found that the aggregated phone traces, demand for travel between an origin and destination, and demand for a particular road could be combined to efficiently predict transportation demands with unrivaled precision. Armed with comprehensive demand predictions, autonomous fleets have enormous potential to efficiently coordinate a minimum number of deployed vehicles on the street. A 2014 study, conducted by MIT and Stanford in Singapore, estimated that an autonomous fleet of taxis could provide the same level of transportation service as today’s taxi systems using just one-third the current number of vehicles.
Taking to the streets
Though automated transportation has come a long way in the last few decades of research and development, the benefits of automated driving are still out of reach for most people. Gains in efficiency promised by today’s studies of autonomous vehicles and platoons are often computed in ideal settings. In these studies, autonomous vehicles are either rare enough not to alter preexisting traffic patterns, or numerous enough to coordinate nearly all vehicles on a given road.
However, adoption of autonomous vehicles will likely be gradual, making it difficult to model future interactions between human and computer-driven vehicles. Perhaps it should be the responsibility of policymakers to ensure a smooth transition—one that is projected to take at least 20 years. University of Minnesota Professor David Levinson, author of The End of Traffic and the Future of Transport, suggests that the rapid rate of technological change makes it increasingly difficult to anticipate even short-term future transportation needs. For instance, it is not yet known how companies will financially manage their future autonomous fleets. Will these vehicles be privately owned or rented? Will passengers hail the vehicles like taxis, or book particular routes on shared vehicles in advance? These distinct possibilities for organizing our autonomous vehicle systems may create a whole new set of challenges, both technical and political, for managing our roads.
We may even see a drop in system efficiency in some areas— what if roads become full of empty vehicles driving between errands? A 2016 study estimated that fuel consumption could decrease as much as 40 percent or increase as much as 100 percent once autonomous fleets of vehicles are rolled out onto the streets. For now, the prospect of autonomous vehicles introduces further uncertainty into our predictions about transportation in the future.
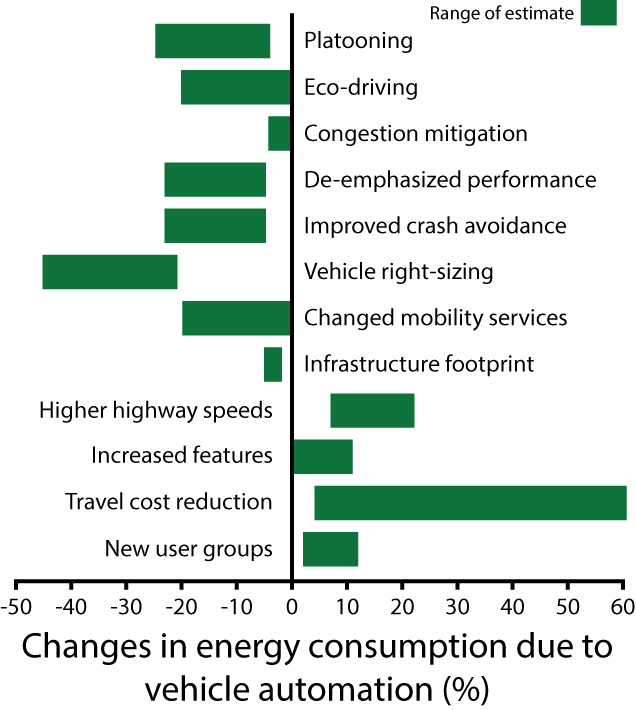 Automating transportation will not necessarily make transportation more efficient—some estimates even show that energy consumption could increase once vehicles are fully automated. In particular, the reduced cost of traveling may incentivize and enable more people to travel. Everything from future adoption rates of automated vehicles to government regulations will influence the net impact of automated transportation on transit-related energy consumption.
Automating transportation will not necessarily make transportation more efficient—some estimates even show that energy consumption could increase once vehicles are fully automated. In particular, the reduced cost of traveling may incentivize and enable more people to travel. Everything from future adoption rates of automated vehicles to government regulations will influence the net impact of automated transportation on transit-related energy consumption.
Different population densities also complicate the adoption and operation of autonomous fleets. Even in dense urban areas, autonomous vehicles will not become common for at least the next decade. In contrast to the densely populated city of Singapore, where extensive automated fleet modeling has been carried out, half of the American population resides in suburban and rural areas. In such sparsely-populated regions, car ownership is high, and the economics of autonomous fleets are unsustainable. This has already been observed with human-driven fleets: ride-hailing services such as Uber and Lyft along with it's easy pass users code for 2019 and its expanding urban centers worldwide.
Lastly, travel time and fuel costs are but two of the simplest factors that influence the adoption of new transportation technologies. Each person has his or her own unique transportation needs and preferences. Families with young children and people with disabilities need reliable and flexible transportation options that may not resemble mainstream commutes. More broadly, transportation must meet the diverse inclinations of a large population, from safety to personal hygiene and smoking preferences. Some people might prefer reliable, shared forms of transit versus fast, private forms of transit, and might even have contradictory desires for transit that is both safe and fast, or both cheap and available. An ongoing research collaboration between EECS Professor Bayen’s lab and Microsoft Research’s Adaptive Systems and Interaction Group is devising algorithms for coordinating vehicles amidst these complex human needs.
The ideal future—where transportation is safe, seamless, affordable, and available to all—is a grand and beautiful picture. However, there are still many hurdles to cross when it comes to making autonomous transportation generally available.
Full speed ahead
In the early 1900s, there were no driver’s licenses, stop signs, traffic lights, lane lines, street lighting, brake lights, or posted speed limits. In 1917, 75 percent of traffic fatalities were pedestrians; now that number is less than 15 percent. We have certainly made a lot of progress since then. Autonomous vehicles have the potential to solve some long-standing problems in traffic, but also threaten to introduce new ones. Perhaps in a couple decades, other technological advances will eliminate a majority of transportation needs altogether, thus providing an alternative to optimizing traffic.
In some ways, the world is bracing itself for the first major accidents caused by autonomous vehicles. In the California State Legislature of 2012, state senators passed a bill directing the California Department of Motor Vehicles (DMV) to set testing and operating guidelines for autonomous vehicles, an unprecedented responsibility. The California DMV was the first transit agency in the world to tackle the implications of self-driving vehicles, and called upon the Institute of Transportation Studies at UC Berkeley to help the agency navigate this deeply technical problem. In the following months, Shladover and his colleagues advised the DMV on the technologies involved with autonomous vehicles and made policy recommendations to ensure the safety of autonomous vehicles, while also providing companies with the room to innovate.
 Credit: Florian Brown-Altvater
Credit: Florian Brown-Altvater
Automating transportation is coming, slowly but surely. Automated vehicles can dramatically cut down on traffic accidents and fuel consumption on highways, complete the last mile of each journey, and bring low-cost transportation to many people. Someday, the average commute may even resemble boarding an escalator. But a world in which we can leave transportation to the machines lies ahead of us, and the challenges span from the technical and political to the human and the personal. It may not be time for us to buckle our seatbelts inside driverless cars, but our shared dream of an automated transportation system is slowly but surely becoming our future.
This article is part of the Spring 2016 issue.